Embed of video is only possible from Mediaspace, Vimeo or Youtube
Robotic exoskeletons provide programmable, consistent and controllable active therapeutic assistance to patients with neurological disorders. As of any robotic devices that work in close proximity with live subjects, the key challenge of an exoskeleton for physiotherapies is the safety. This paper introduces the prototype and the first in vivo test results of a rehabilitative robotic exoskeleton for rodents that had its primary design focus in safety and customizability. With its soft actuator for assistance and lower-limb training of injured rodents, the presented prototype goes beyond previous attempts in literature allowing compliant yet effective manipulation of the fragile limbs of rodents for versatile therapeutic usages. The soft pneumatic actuator (SPA) are specifically developed in place for electrical motors to increase compliance and backdrivability while reducing the weight (the presented prototype weighs about 150 g). This design of the customizable 2 DoF exoskeleton can bear end-effector force load of 1 N, is provides range of motion over 80 mm in the major axis, and current speed of actuation of 2 gait cycles/s. In vivo experiments of the soft exoskeleton shows the validity and applicability of training tasks on rodents.
SPA characterization
We are investigating soft actuator designs available from both the academic and industrial world and are developing our own novel designs of soft pneumatic actuators (SPA), to ultimately build a solution pool for other applications: Soft Origami, Soft Exo-Skeleton, SPA skin, SPA mobile platforms. At this moment, main focus is being put on soft pneumatic actuators due to their inherent flexibility, safety of operation, lightweight and tunability.
For the soft origami applications, we are developing pneumatic actuators capable of folding motion, and by attaching them on the creases, we can build a different prototype from that of SMA which will give us different point of view on origami.
We are also using SPAs for applications in rehabilitative soft exoskeletons. This is an interdisciplinary project since it comes from the collaboration with another two great groups at EPFL, the IRP lab and TNE lab, both in Bioengineering. We are using soft materials to build the exoskeleton to serve as a robotic rehabilitator for rats with Spinal Cord Injury (SCI). This is a typical case where rigid robotic interfaces are too cumbersome and soft exoskeleton solution fits right to the point.
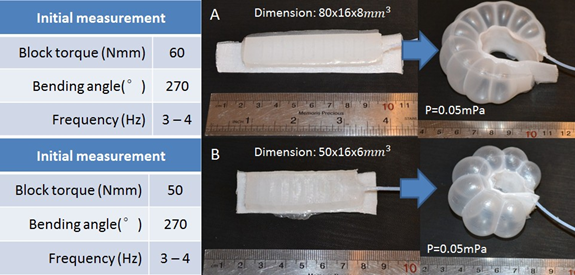
Multi-chamber soft pneumatic actuators before and after
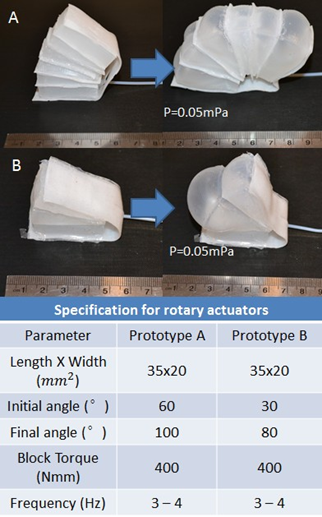
Rotary soft pneumatic actuators before and after
References
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.