Systems Control and Multiagent Optimization Research
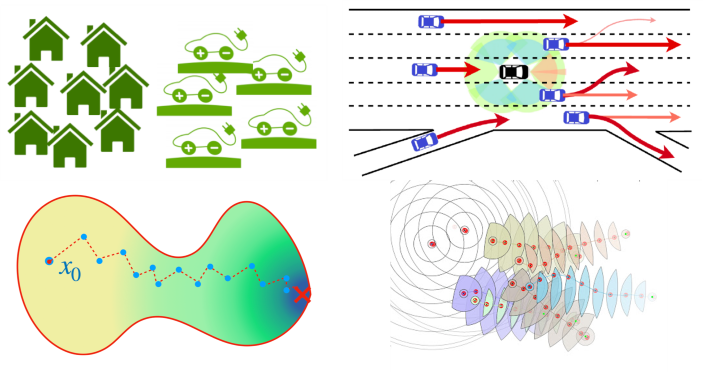
Our focus is on advancing fundamental understanding of multi-agent decision-making in uncertain and dynamic environments. Towards this vision, we develop game theory, distributed control, stochastic and data-driven safe control. Our theoretical work is motivated by applications ranging from transportation and power grid systems to rescue robotics. Please check out some of our publications for further details.