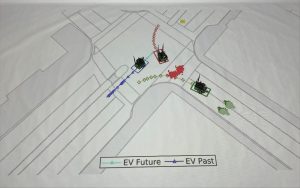
1. Overview:
This project focuses on developing trajectory planning solutions for autonomous systems in interactive environments. The goal is to create algorithms enabling each robot to safely reach its destination while navigating complex scenarios, such as multiple autonomous cars at non-signalized intersections or multi-robot systems requiring formation control and coordination. Key challenges include collision avoidance with other agents and obstacles. The methodologies will be implemented and tested on an Nvidia Jetbot multi-robot testbed.
2. Responsibilities:
– Literature review of existing trajectory planning methods within the frameworks of stochastic optimal control and game theory.
– Implementing the chosen control algorithms on the robotic testbed.
– Evaluating the algorithms for optimality, safety, and computational efficiency.
– Developing new algorithmic approaches for multi-robot trajectory planning based on the needs of the problem.
3. Requirements:
– Familiarity with ROS/ROS2 and independence in trouble-shooting.
– Proficiency in Python for algorithm development and system integration.
– The project requires strong academic performance in control courses including model predictive control (MPC).
Note: To apply, send an email to kai.ren@epfl.ch including 1. one paragraph on your background and fit for the project, 2. your BS and MS transcripts. This project will be supervised by Prof. Maryam Kamgarpour and Kai Ren (kai.ren@epfl.ch).