Student projects

Available

No-swap regret in repeated games with unknown constraints
Motivation:Several real-world multi-agent systems such as electricity markets, traffic routing, and multi-robot applications can be described as repeated games with unknown constraints. In electricity markets, there are capacity constraints on the load of each grid line. In multi-robot applications in unexplored environments, the robots have to accomplish a task while avoiding collision with obstacles and (…)
Finetuning Policy via Reinforcement Learning from Human Preferences (Semester Project/ Master Thesis)
OutlineThis project aims to fine-tune robotic manipulation policies via reinforcement learning from human preferences (RLHF).MotivationIn robotic manipulation, policies are typically learned via (a) RL in simulation or (b) behavioral cloning (BC) from demonstrations. However, both approaches struggle to generalize: RL policies face a sim-to-real gap, and BC suffers compounding errors that drive trajectories off the (…)
Information Design in Local Energy Markets (Semester Project)
OutlineThis project aims to apply the theory of signalling in games to local energy markets, with simulations on real-world distribution grids.MotivationLocal Energy Markets are a framework to integrate small-scale energy resources at the household level towards the wider grid. Local Energy Markets typically consist of a market operator, who is responsible for pricing and information (…)

From Finite to Infinite-Horizon Normal Form Games (Master Thesis)
OutlineDevelop the theoretical framework linking finitely and infinitely repeated normal form games (such as the prisoners’ dilemma), and validate it on a real-world-inspired strategic scenario.MotivationThe Prisoner’s Dilemma is one of the most well-known models in game theory [1], capturing situations where individual incentives conflict with collective benefit. Its repeated version has been widely used to (…)





Ongoing
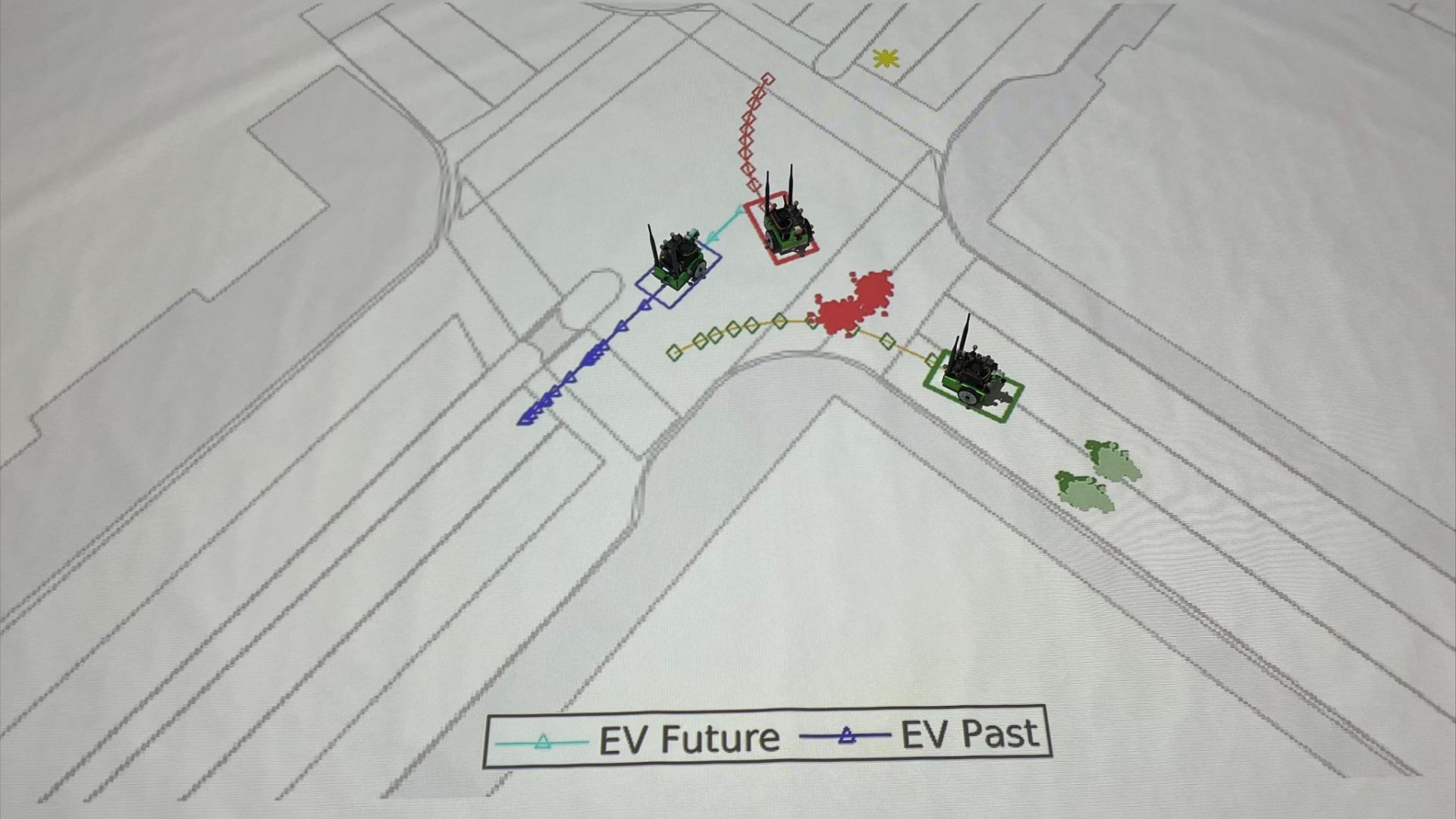
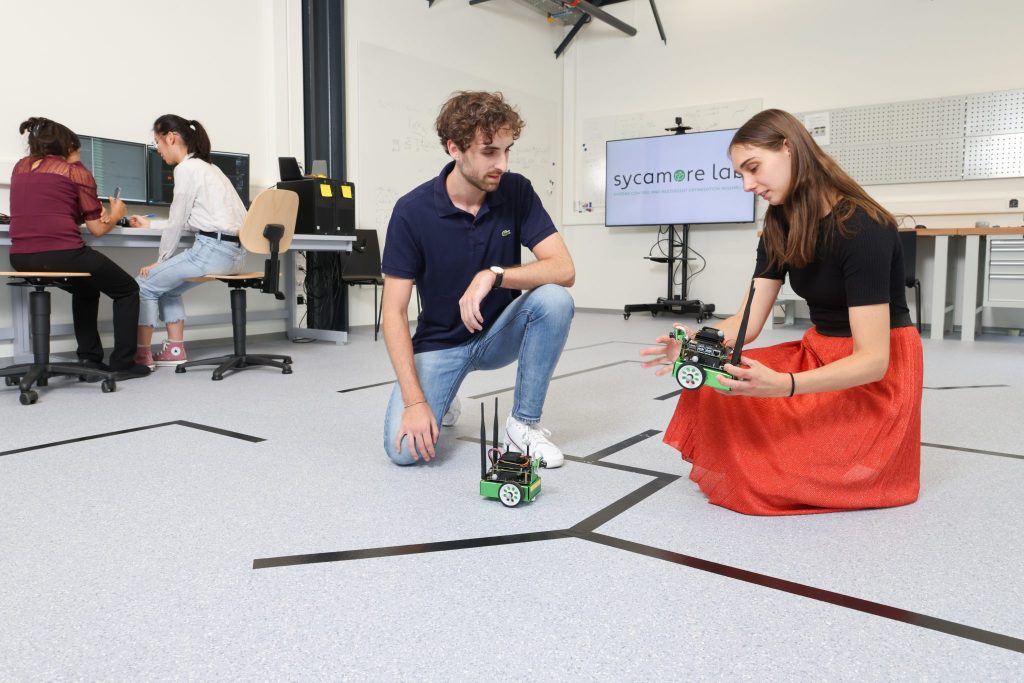
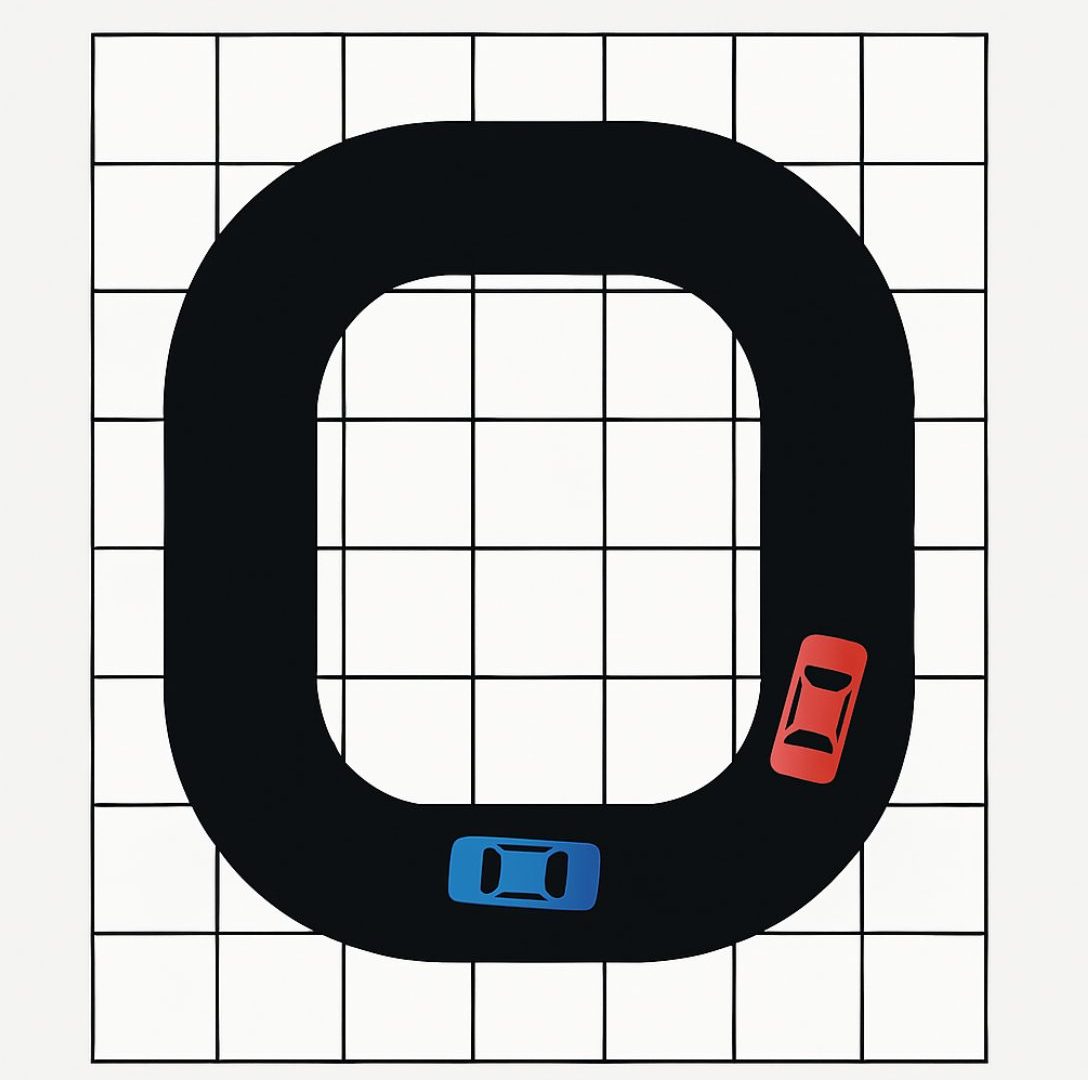
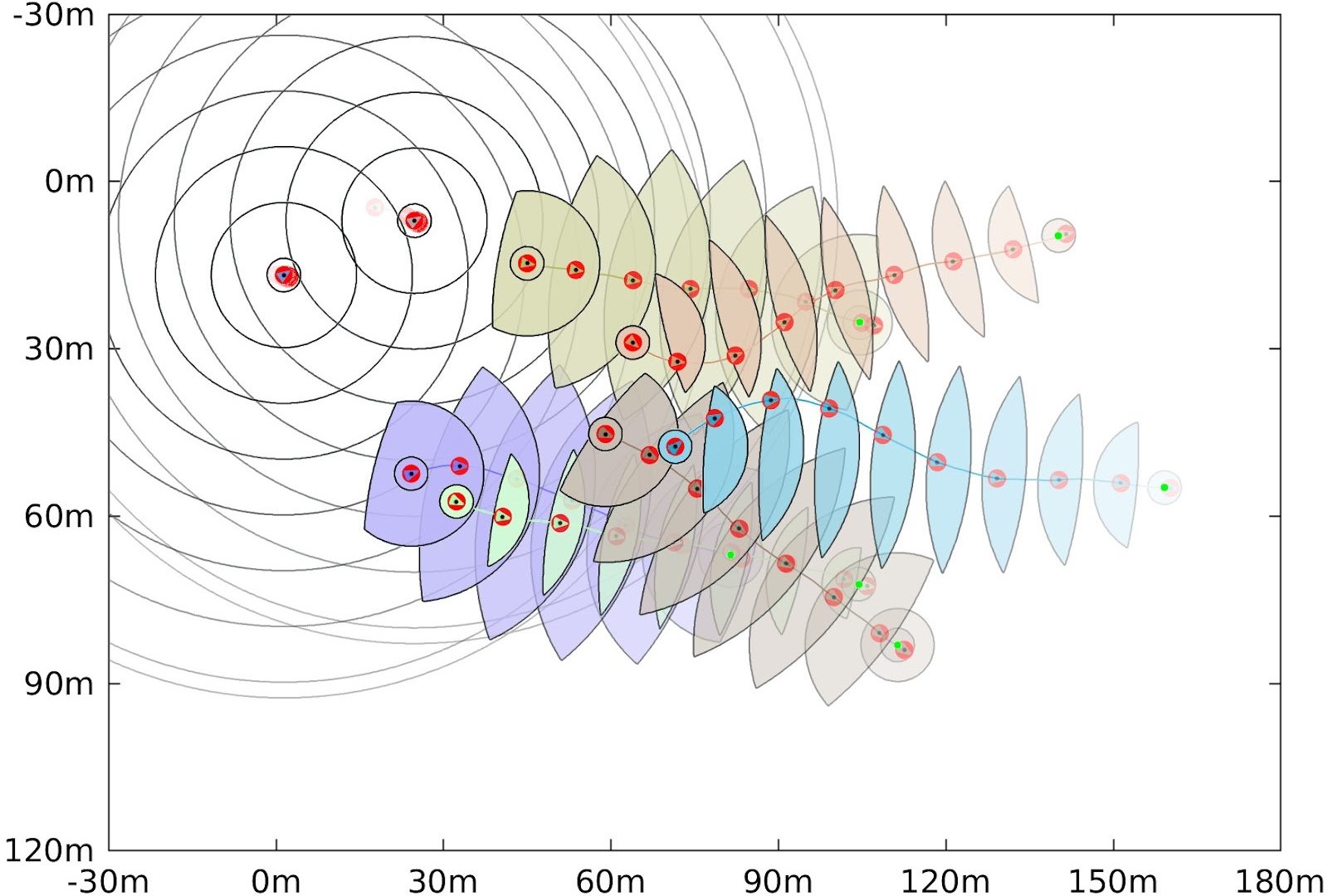
Multi-robot Trajectory Planning Under Traffic Interactions
1. Overview:This project focuses on developing trajectory planning solutions for autonomous systems in interactive environments. The goal is to create algorithms enabling each robot to safely reach its destination while navigating complex scenarios, such as multiple autonomous cars at non-signalized intersections or multi-robot systems requiring formation control and coordination. Key challenges include collision avoidance with (…)
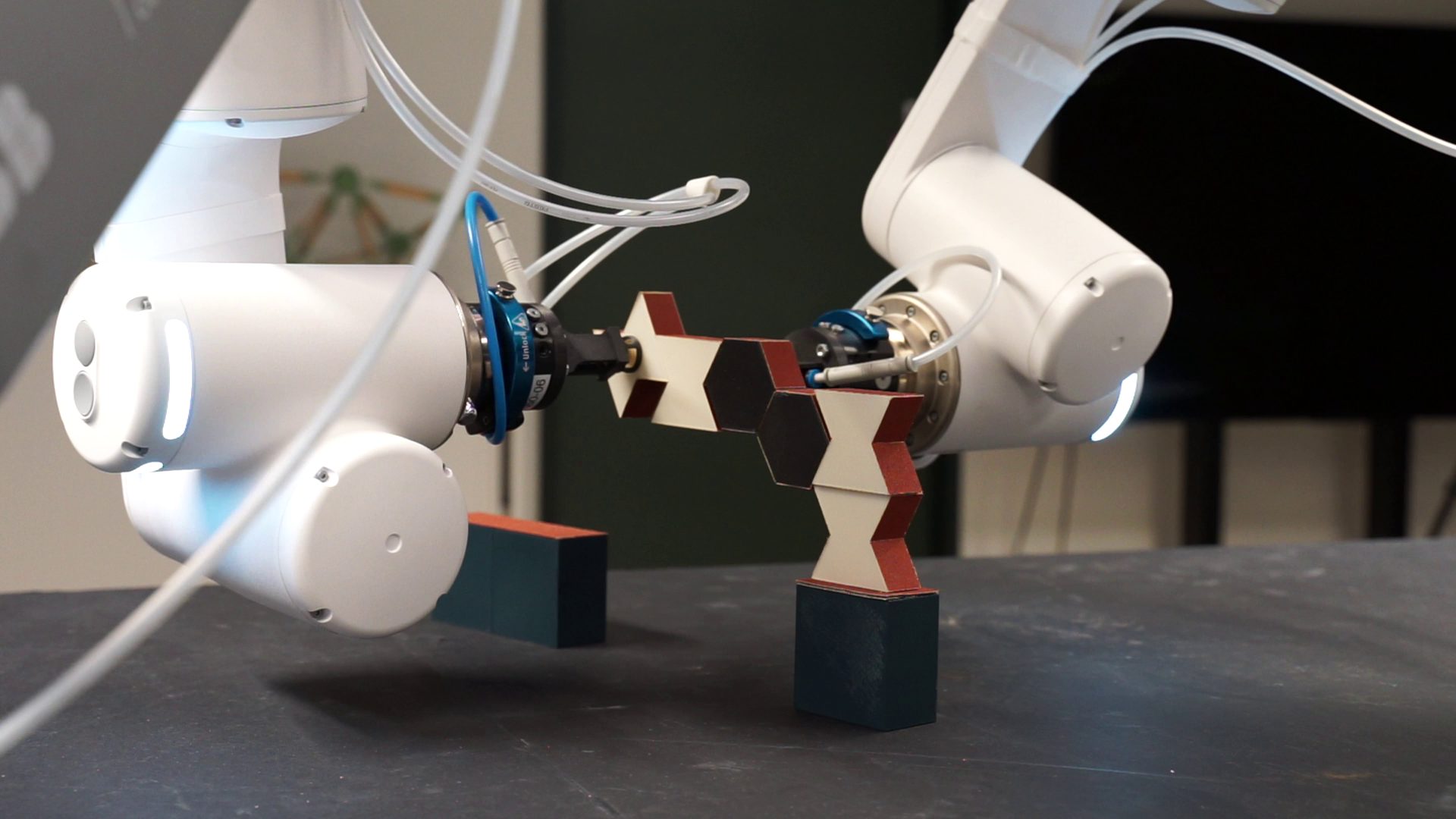
Stability Guided Reinforcement Learning for Autonomous Robotic Construction
MotivationWhile automation has been widely adopted in many industries, the construction sector has been relatively left aside. The unpredictable construction site requires frequent replanning of robots at the last minute, which is not the case in an assembly line. Employing robots in construction requires developing new algorithms to enhance their autonomy and intelligence.This project inscribes (…)
Competitive Multi-agent RL with Coupling Constraints
Motivation. In multi-agent reinforcement learning, several agents interact in a shared environment that evolves over time based on the decisions of all agents. Each agent tries to maximize its own reward, which often depends not only on its own actions but also on the actions of others. In many real-world applications, agents must also satisfy (…)

Regularized Cost Functions for Receding Horizon Games (Semester Project)
OutlineThe project aims to investigate how regularization in receding-horizon linear-quadratic games can guide strategies toward a chosen infinite-horizon Nash equilibrium, and validate the approach on a real-world-inspired case study.MotivationMany games in the real world, such as those arising in energy markets or multi-robot coordination [1], are naturally modeled over an infinite time horizon. However, solving (…)
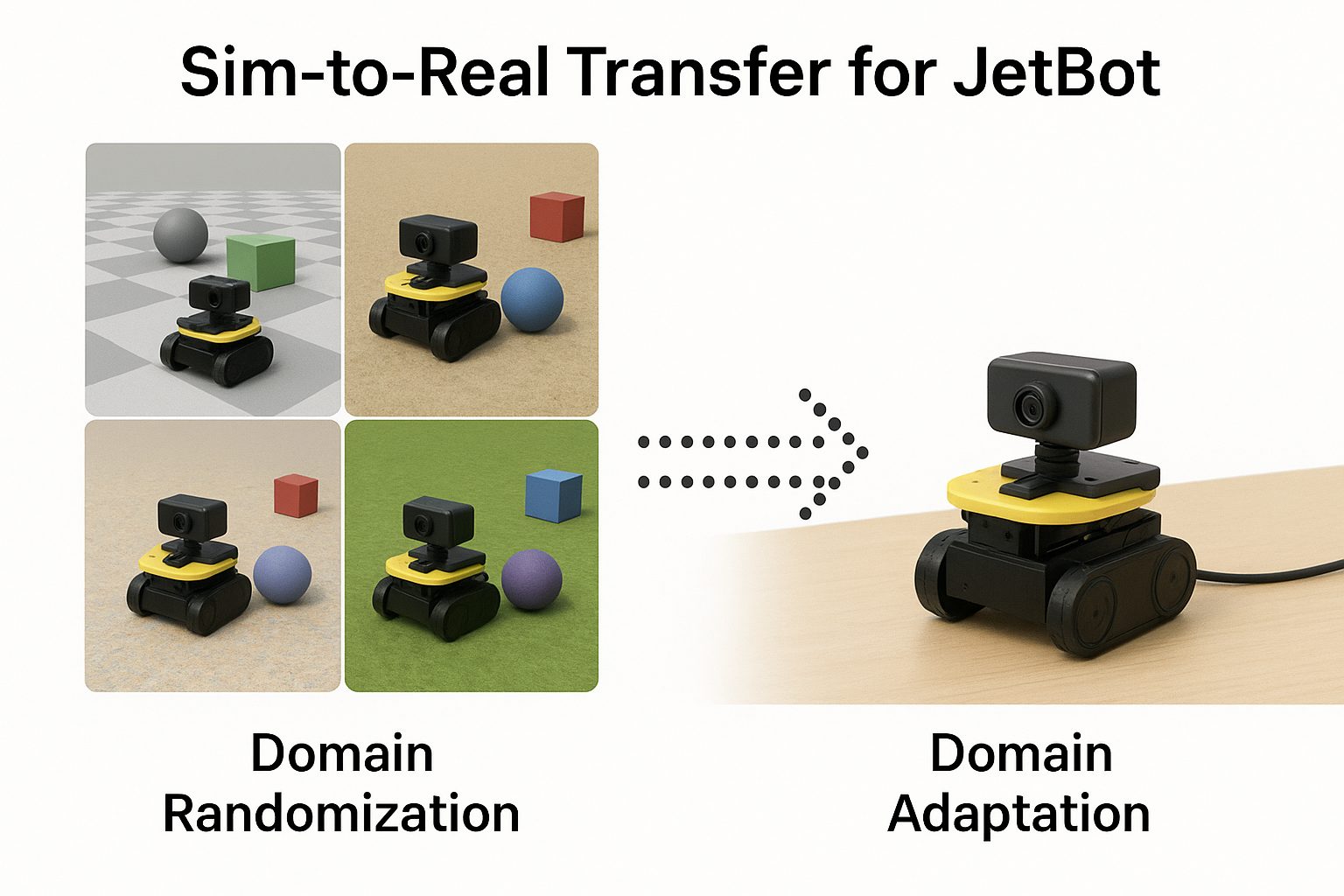
Sim-to-Real Transfer for JetBot via Domain Randomization and Adaptation (Semester Project)
OutlineThis project aims to develop and evaluate reinforcement learning (RL) policies that are robustly transferable from simulation to the real world for the NVIDIA JetBot, using techniques such as domain randomization, domain adaptation, and hybrid sim-real fine-tuning.BackgroundDeep RL has demonstrated remarkable success in robotic control tasks. However, policies trained in simulation often degrade significantly in (…)
Previously done
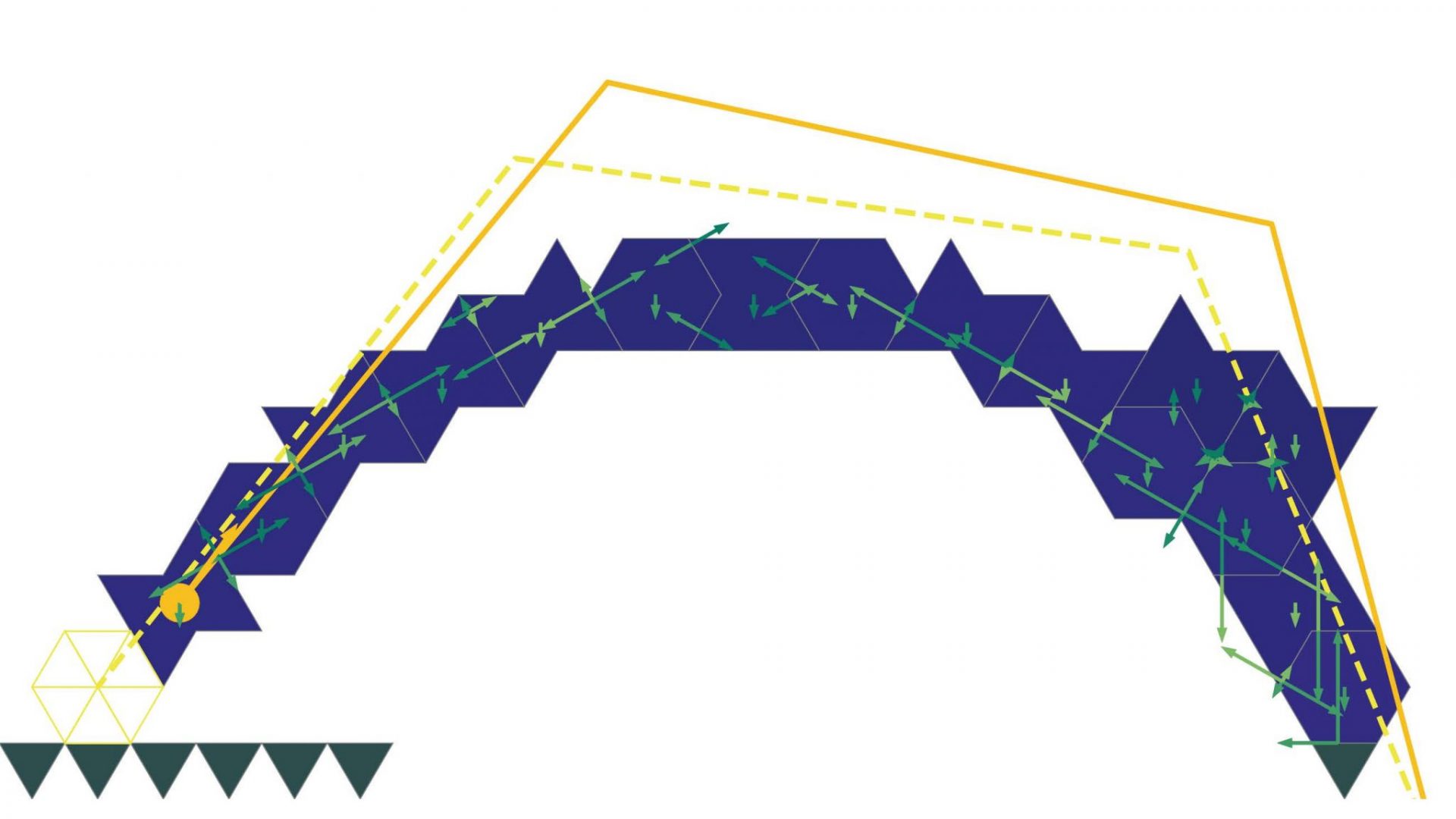
Reward learning from human feedback for the Construction of Spanning Structures
Abstract: This semester project addresses the challenge of building a structure connecting two supports across a gap, using reinforcement learning from human preferences. This approach involves learning a reward predictor from human feedback between pairs of demonstrations of the construction task. After presenting the algorithm used to train the agent with human feedback, the report (…)
Coordination and Control of a Group of Ground Robots
Multi-robot systems are becoming increasingly popular and are being used in more and more applications such as warehouses, agriculture, and transportation. The objective of this project is to control and coordinate a group of ground robots. Controlling a single ground robot requires planning the desired path and computing actuation inputs to maneuver the robot based (…)
Optimal Task Assignment and Collision Avoidance for Mobile Robots
Multi-robot systems provide great benefits in applications such as coordinated search and rescue, large scale agriculture, and efficient transportation of people and goods. When a group of mobile robots operate in shared space coordination between them is crucial. In particular, strategies for task assignment and collision avoidance are needed. Task assignment is the problem of (…)

Game theory for energy communities
MotivationIn order to promote an increase in the use of renewable energies, the European Union is thinking about promoting decentralized approaches, where the citizens are actively participating in the production and storage of energy. Declining prices for solar panels and the ability to sell and buy electricity amongconsumers (it is already possible in some countries (…)
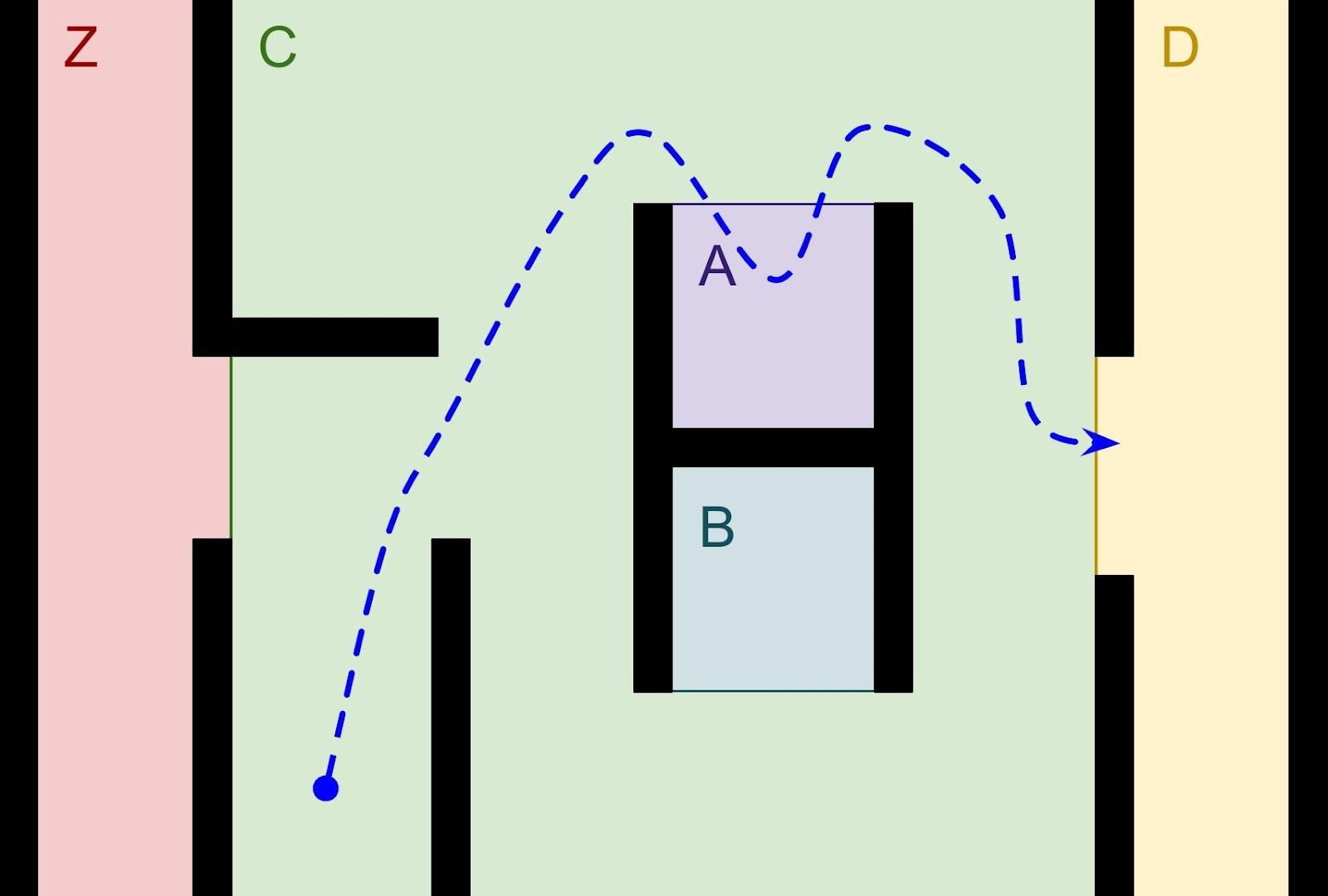
Robot Motion Planning via Mixed-Integer Programming
Motion planning plays a key role in the autonomous control of mobile robots. With the advancement of technology and the introduction of increasingly sophisticated autonomous vehicles, such as self-driving cars, delivery drones, and warehouse robots, complex motion planning objectives and constraints need to be considered. The objective for an autonomous car could be the minimisation (…)

Safe reinforcement learning
Reinforcement learning addresses finding a policy for a Markov decision process (MDP) to optimise a cumulative reward function based on the observations of the rewards and the evolution of the MDP. The application of reinforcement learning to safety-critical systems such as autonomous driving and robotics requires safety, that is, satisfying constraints while learning (e.g. collision (…)

Augmented Robot Reality: Projecting the Virtual into the Real World
Multi-robot systems provide great benefits in applications such as coordinated search and rescue, large scale agriculture, and efficient transportation of people and goods. This motivates research on novel coordination, planning, and control algorithms. To develop such algorithms it is crucial to test ideas rapidly in a setting that is both repeatable and adaptable to different (…)
Model-free risk-sensitive inverse reinforcement learning
Description:The primary goal of this project is to develop a model-free algorithm for risk-sensitive inverse reinforcement learning (IRL), where the expert’s behavior is driven by optimizing a risk measure rather than the expected discounted reward [1]. While the approach proposed in [1] requires access to the transition law, our objective is to create an algorithm (…)
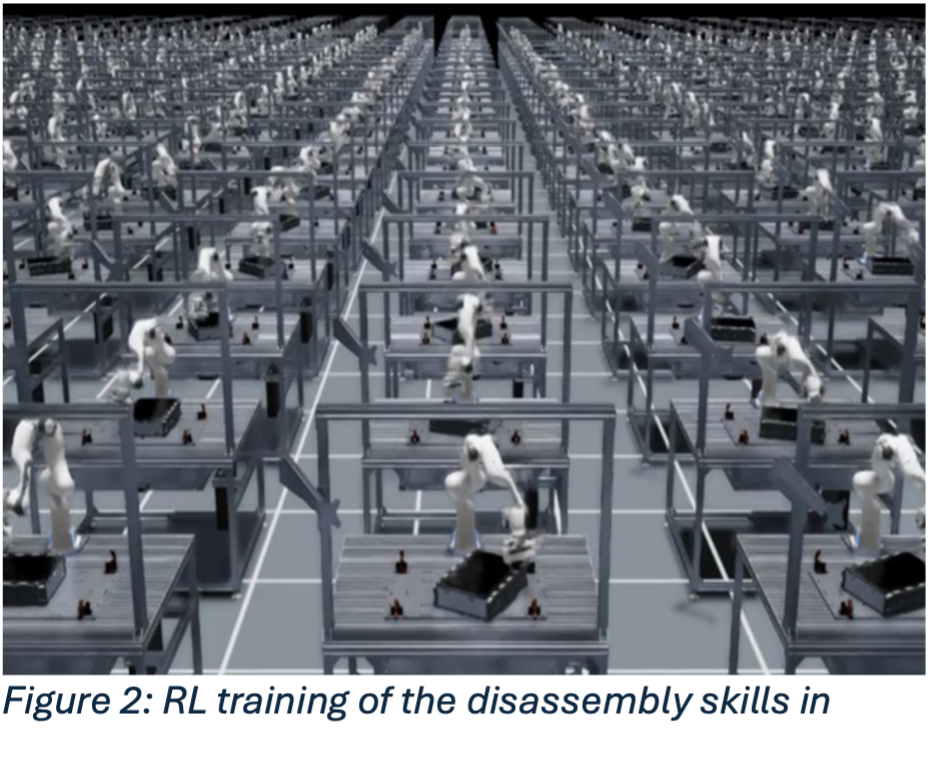
Automating Reward Function Design Using LLMs for Robotic Disassembly of EV Batteries
Background and MotivationThe rapid growth of electric vehicles (EVs) is leading to a surge in the number of end-of-life (EOL) batteries, which require safe and efficient recycling processes. Disassembling battery packs is a complex and hazardous task, where robots can offer advantages in terms of precision, safety, and repeatability. However, existing robotic systems face challenges (…)