Amputation of the upper extremity causes severe and permanent disability, because the hand plays a central role in our ability to explore and interact with the outside world. Strategies to replace a missing rely on replacing the extremity with an artificial equivalent. The most promising approach relies on the use of motorized prosthetic limbs which can be controlled by the wearer’s muscular activity, resulting in a relatively intuitive control interface. Such myoelectric prostheses can lead to encouraging gains in autonomy and quality of life, but remain riddled with various types of limitations. One of the major features which has yet to be implemented in a commercial system is the ability for prosthesis wearers to feel what the artificial limb is touching or how it is moving. Restoring meaningful sensory feedback is a challenging endeavor, which involves interfacing an artificial, electronic system with the nervous system in order to convey information.
Prosthesis control
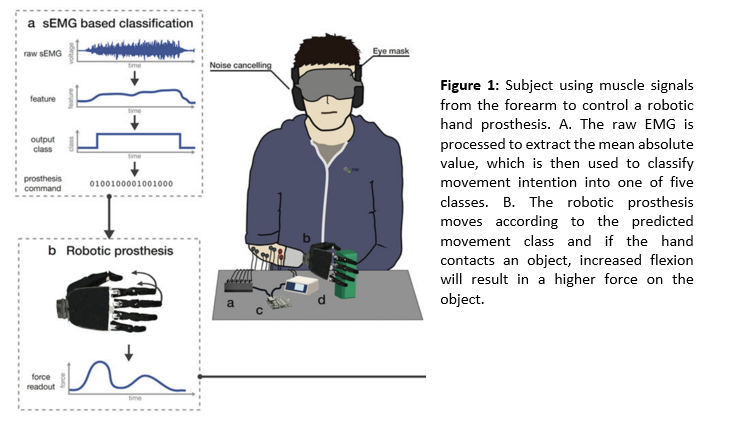
Powered myoelectric prostheses have the potential to restore mobility to amputees by predicting their hand movements from their remaining arm muscles. However, current off-the-shelf prostheses still employ very crude methods of control, often only allowing one degree of freedom (ex. Opening or closing of the hand). We previously demonstrated successful real-time classification of five hand movement types from surface electromyography (EMG): rest, ulnar grasp (flexion of the ring and pinky fingers), pinch grasp (flexion of the thumb, index and middle fingers), full hand grasp (flexion of all digits) and hand opening (Raspopovic et al., 2014). Figure 1 shows the experimental setup of a subject controlling movements of a robotic prosthesis using surface EMGs.
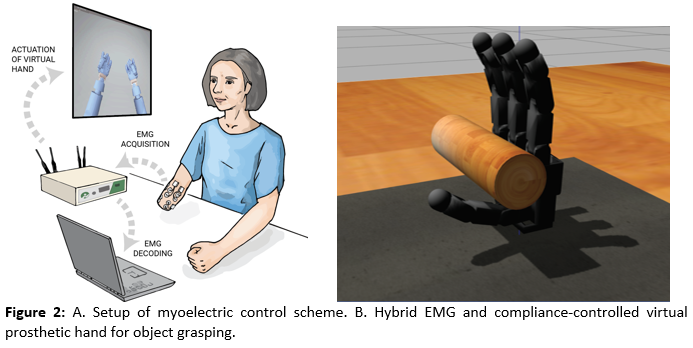
We are now investigating the possibility of decoding single finger movements proportionally from the surface EMG signal. To do this, we employ a multi-layer perceptron (MLP) to decode joint angles from each finger and actuate a virtual hand with the prediction results (Figure 2a). We are also implementing a “hybrid” controller gives the user some robotic assistance for object grasping (Figure 2b). We hypothesize that the assistance can improve grasp stability and lessen the effort of the user.
References:
- S. Raspopovic et al., Restoring natural sensory feedback in real-time bidirectional hand prostheses, Science translational medicine, 2014.
Contact
If you are interested in this research topic and wish to learn more, don’t hesitate to contact us:
Vincent Mendez (vincent.mendez@epfl.ch)
Fiorenzo Artoni (fiorenzo.artoni@epfl.ch)