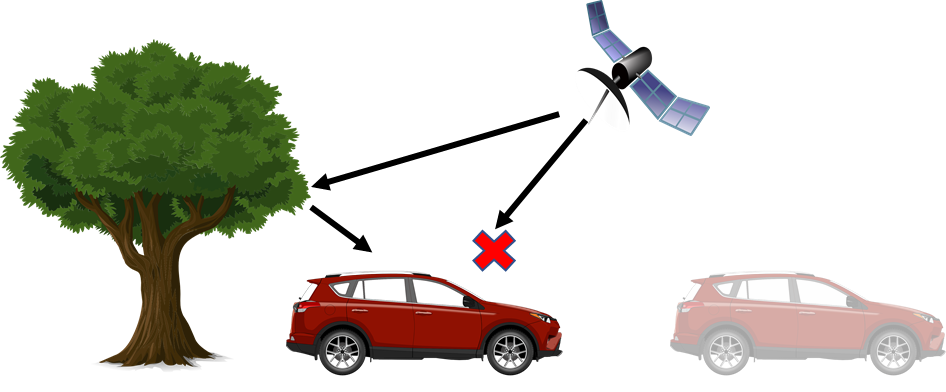
Terrestrial mobile mapping has been gaining popularity in the recent years. One of the greatest challenge in mapping is to know the exact location of the vehicle when pictures are taken. However, the buildings and vegetation in the area can cause situations where the GNSS signal is denied. This leads to drifts in the estimated position. In this project, the student will be exploring the introduction of a new measurement using the dynamics model of the vehicle in order to reduce this drift.
This project is part of the H2020 GAMMS. The objective is to develop a autonomous terrestrial mobile mapping system. EPFL would be contributing to the vehicle dynamic part of the project to address situation where the GNSS signal is denied.
Vehicle dynamic models are the dynamic models of a platform that predicts the linear and angular acceleration of a platform from input using the laws of physics. For a fixed wind UAV, these inputs would be the aileron angle, elevator angle etc. This knowledge about the dynamics of a platform can be integrated as a new measurement in the sensor fusion using a framework such ROAMFREE.
[1] [2]
Work breakdown
- Selection of set of sensors that can interface with the current autonomous vehicle
- An exploration of various vehicle dynamic models that could be used for an autonomous land vehicle.
- Analyzing the pros and cons of each developed models by testing in a vehicle simulator.
Recommended type of work
Semester project, Master thesis
Keywords
Vehicle dynamic model, Sensor fusion, Mapping