
Skeleton-based Action Recognition
Recognizing the actions performed by humans from their skeletons.
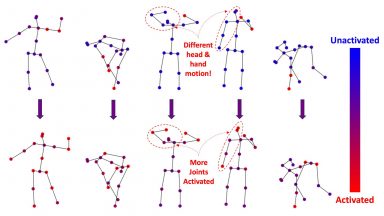
Robust action representation learning
We propose a simple method to improve the robustness of transformer-based skeletal action recognition models against skeleton perturbations.

3D Semantic Occupancy Prediction
Aim to reconstruct the 3D geometry and semantics of the surrounding environment with voxel grids from the camera or LiDAR input.

WholeBody Human Pose Estimation: Keypoint Communities
We propose a principled way to quantify the independence of semantic keypoints. Through training a pose estimation algorithm with a weigthed objective, we are able to predict fine-grained human and car poses.

3D Human Detection
We have been exploring how to detect humans in the 3D space only using cameras, which are cheap, reliable and ubiquitous. Our major applications are autonomous vehicles and delivery robots. We focused on challenging cases (the long tail) and uncertainty estimation to improve the reliability of autonomous systems.
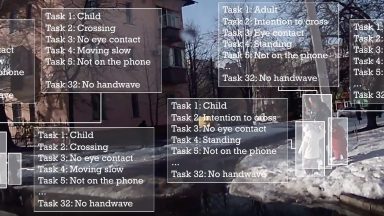
Detecting 32 Pedestrian Attributes for Autonomous Vehicles
Joint pedestrian detection and attribute recognition with fields and Multi-Task Learning.

Perception: Human Pose Estimation
Multi-person human pose estimation that is particularly well suited for urban mobility such as self-driving cars and delivery robots.
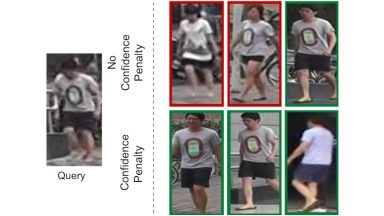
Perception: Person Re-Identification
Improved person re-identification which deals with the uncertainty of a model.
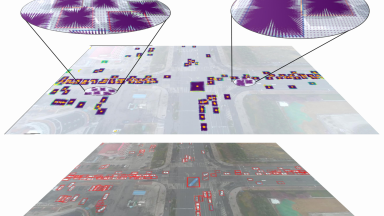
Perception: Traffic Perception
Adapting fields for detection from aerial images