Ongoing projects

Crowd-Robot Interaction
Mobility in an effective and socially-compliant manner is an essential yet challenging task for robots operating in crowded spaces. In this project, we want to go beyond first-order Human-Robot interaction and more explicitly model Crowd-Robot Interaction (CRI). More details here.
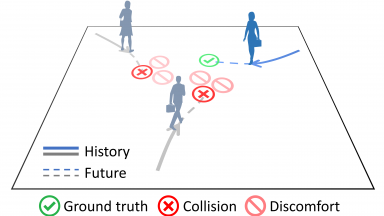
Social-NCE
Learning socially-aware motion representations is at the core of recent advances in multi-agent problems, such as human motion forecasting and robot navigation in crowds. In this work, we introduce a contrastive learning approach built with negative data augment to promote robust motion representations.