Social NCE: Contrastive Learning of Socially-aware Motion Representations
Yuejiang Liu, Qi Yan, Alexandre Alahi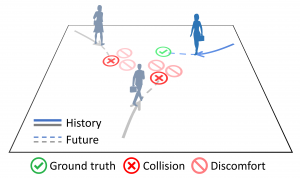
Learning socially-aware motion representations is at the core of recent advances in multi-agent problems, such as human motion forecasting and robot navigation in crowds. Despite promising progress, existing representations learned with neural networks still struggle to generalize in closed-loop predictions (e.g., output colliding trajectories). This issue largely arises from the non-i.i.d. nature of sequential prediction in conjunction with ill-distributed training data. Intuitively, if the training data only comes from human behaviors in safe spaces, i.e., from “positive” examples, it is difficult for learning algorithms to capture the notion of “negative” examples like collisions. In this work, we aim to address this issue by explicitly modeling negative examples through self-supervision: (i) we introduce a social contrastive loss that regularizes the extracted motion representation by discerning the ground-truth positive events from synthetic negative ones; (ii) we construct informative negative samples based on our prior knowledge of rare but dangerous circumstances. Our method substantially reduces the collision rates of recent trajectory forecasting, behavioral cloning and reinforcement learning algorithms, outperforming state-of-the-art methods on several benchmarks.
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.