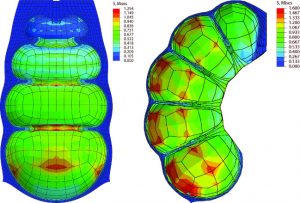
These images represent the motion-force profiles for soft actuators in linear and bending motion.
Soft pneumatic actuators consisting of elastomeric matrices embedded or reinforced with flexible materials are of particular interest to the robotics community because they are lightweight, affordable and easily customized to a given application. They enable the achievement of safer and flexible interaction in a variety of applications including robotic grasping, wearable systems, versatile locomotion, and biomedical rehabilitation. These actuators can be rapidly fabricated in a multi-step molding process and can achieve combinations of extension/contraction, bending and rotary motion. By defining motion and force profile requirements, it is possible to program these soft actuators to achieve the performance requirements with simple tunable control inputs such as air pressure.
References:
- Introduction to modeling of soft actuators
- Open source design tool for modeling actuators
- P. Moseley, J.M. Florez, H.A. Sonar, G. Agarwal, W. Curtin, J.Paik. Modeling and Design of Soft Pneumatic Actuators, accepted for publication in Advanced Engineering Materials, DOI: 10.1002/adem.201500503, 2015.